近年の急速な科学技術の発達により、ロボットが産業用に止まらず一般社会や家庭に普及・導入されています。全自動洗濯機も洗濯ロボと呼んでも良いと思います。それらのロボットやメカトロニクス製品の開発を行います。また、世界的な自律型ロボットのコンテストであるワールドロボットオリンピアード(WRO)にも参加し、ICTを活用した国際交流も行います。
学生には各学会での論文発表のほか、国際会議にも積極的に参加してもらいます。さらに、生活を豊かにする作品を学会主催の発明工夫コンテストにも出品します。
基本情報
研究紹介
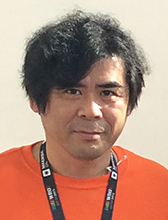
AIを活用した農薬散布ロボットの開発
CCDカメラで撮影した画像を解析し、作物の葉を検知しロボットが農薬を噴霧します。AIを用いて病害等の検出を自動的に行い、いちごやキュウリなどはのうどんこ病や炭疽病などの病気に対応した薬剤を噴霧できるロボットも開発している。開発したロボットにより、農薬中毒や熱中症から農家の方を守ります。
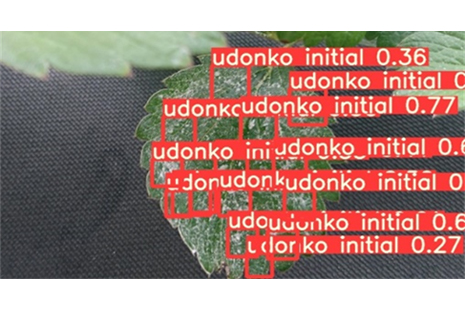
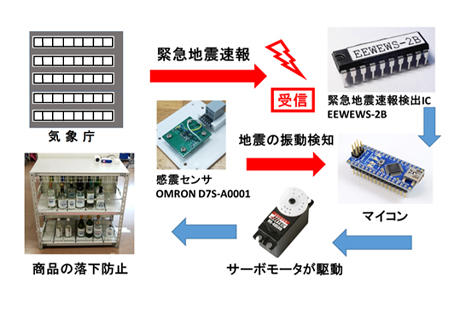
緊急地震速報にリンクした減災システムの開発
本研究では地震発生時に緊急地震速報とリンクしてコンビニやスーパーマーケットの商品棚からのビン類などの商品の落下、破損を防ぐシステムの開発を行った。作品は国際イノベーションコンテスト2021で世界2位にかがやいている。
手すり除菌ロボットの開発
自律的に手すりの除菌を行いながら人と接触しない安全性を考慮したロボットを開発し、手すりの除菌と移動の検証を行います。ICタグを廊下の壁の要所に配置することで、手ドア付近や旋回の際に音や光を用いて周知し、人と接触せずに安全な走行を可能にしている。作品は日本産業技術教育学会から学会長賞を受賞している。
ヒトスジシマカなどの感染症を媒介する蚊のオートサンプリングマシンの開発
無人および自動で蚊の発生状態を調査するためのオートサンプリングマシンの開発。炭酸ガス・熱・匂いの3要素で蚊を誘引し、ロボットが捕獲します。乳牛などの家畜にたかる蚊の駆除にも取り組んでいます。
論文発表・学会発表
論文発表
| 題名 | 研究室 | 内容 |
| Development and Usability Test of Pesticide Spraying Robot for Greenhouse | 蓮田裕一 研究室 | 詳細 |
| 題名 | 研究室 | 内容 |
| Suppression of burrs in austenitic stainless-steel by applying magnetic-field-assisted method | 蓮田裕一 研究室 | 詳細 |
| The system to prevent falling products in stores linked with earthquake early warning | 蓮田裕一 研究室 | 詳細 |
| Development of an automatic sampling machine for mosquito surveillance | 蓮田裕一 研究室 | 詳細 |
| The voice call system to prevent falls of care recipients in the toilet | 蓮田裕一 研究室 | 詳細 |
| 題名 | 研究室 | 内容 |
| Design and Production of the Robot for National Skills in Japan and Participation in the Competition | 蓮田裕一研究室 | 詳細 |
| Design and Production of the Robot for WRO International Competition | 蓮田裕一研究室 | 詳細 |
| Emergency drainage system of LPG tank linked with earthquake early warning | 蓮田裕一研究室 | 詳細 |
| Development of auto-sampling machine for sanitary pest and surveillance | 蓮田裕一研究室 | 詳細 |
| Life history and Nymphal habitat of the Mayfly Ephoron shigae(Ephemeroptera:Polymitarcidae) | 蓮田裕一研究室 | 詳細 |
| 題名 | 研究室 | 内容 |
| Some Factors influencing the drift rates of mayfly larvae in the artificial stream | 蓮田裕一研究室 | 詳細 |
| A Braking System of Instruments for Dental Treatments in Case of Earthquake | 蓮田裕一研究室 | 詳細 |
| Development and effect of Micro Processing for teaching materials using a machining center | 蓮田裕一研究室 | 詳細 |
| The Practice and Achievement of Creativity Education through Problem-Solving Classes | 蓮田裕一研究室 | 詳細 |
| Investigation of the Accuracy of the Sensors used for Educational Robots and Effective Exemplification of the Use | 蓮田裕一研究室 | 詳細 |
| 題名 | 研究室 | 内容 |
| Grinding of Difficult-to-Machine Materials for Rolls using Metal bonded CBN wheel | 蓮田裕一研究室 | 詳細 |
学会発表
| 演題名 | 学会名 | 研究室 | 内容 |
| 手すり消毒ロボットの開発 | 第32回日本産業技術教育学会関東支部(東京大会) | 蓮田裕一研究室 | 詳細 |
| 河川要素を再現した水生昆虫の飼育装置の開発 | 第32回日本産業技術教育学会関東支部(東京大会) | 蓮田裕一研究室 | 詳細 |
| 量産化を視野にいれたヒトスジシマカのオートサンプリングマシンの開発 | 第32回日本産業技術教育学会関東支部(東京大会) | 蓮田裕一研究室 | 詳細 |
| WRO2019ハンガリー大会における競技ロボットの設計製作 | 第32回日本産業技術教育学会関東支部(東京大会) | 蓮田裕一研究室 | 詳細 |
| 手すり除菌ロボットの開発 | 日本機械学会2020年度栃木ブロック研究交流会 | 蓮田裕一研究室 | 詳細 |
| 地震発生時のコンビニやスーパーにおける商品の落下を防止するシステム | 日本機械学会2020年度栃木ブロック研究交流会 | 蓮田裕一研究室 | 詳細 |
| 演題名 | 学会名 | 研究室 | 内容 |
| トイレでの高齢者の転倒を防ぐ介護ロボット | 第12回科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| ADVANCED ROBOTICS CHALLENGEロボットの設計とプログラミング | 第12回科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 緊急地震速報を活用した店舗商品の落下防止システムの開発 | 第31回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 衛生害虫のオートサンプリングマシンの開発と実験 | 第31回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| マイコンを駆使したものづくり教育の実践と成果 | 第31回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 農薬散布ロボットの開発 | 第31回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 演題名 | 学会名 | 研究室 | 内容 |
| 大学初の技能五輪全国大会移動式ロボットへの挑戦 | 科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| WRO2017コスタリカ大会における競技ロボットの設計製作と動向 | 科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 緊急地震速報と連動したLPGタンクの緊急排水システム | 第30回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 衛生害虫のオートサンプリングマシンの設計と製作 | 第30回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| ハウス内での健康被害を防ぐ農薬散布ロボットの開発 | 第30回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 自律型ロボットの制御とロボコン日本大会参加 | 第3回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| プログラムの並列処理を重点とした自律型ロボット | 第3回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 衛生害虫のサーベイランスに用いるオートサンプリングマシンの設計と製作 | 第3回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 緊急地震速報を用いたLPGタンクの減災システム | 第3回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| ハウス内で自律走行する農薬散布ロボットの開発 | 第3回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 演題名 | 学会名 | 研究室 | 内容 |
| ビニールハウス内での農薬散布による健康被害を防ぐロボットの設計と開発 | 科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| myRIOとEV3による画像解析とARCロボットの設計製作 | 科学技術におけるロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 問題解決型の授業を通したものづくり教育の実践と成果 | 第29回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| 緊急地震速報と連動した歯科治療用ハンドピースの停止システム | 第29回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
水生昆虫の流下個体数の測定システム
-カゲロウの生活型の違いによる流下個体数の変化- | 第29回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| WRO2017コスタリカ大会における自律型ロボットの動向 | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 高校生ロボットアメリカンフットボール大会の概要とロボットの設計製作 | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 技能五輪全国大会用ロボットの設計製作 | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| EEWを用いた歯科用ハンドピースの停止システム | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| カゲロウ幼虫の流下個体数計測システム | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| WROコスタリカ世界大会出場ロボットの設計製作 | 第2回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 演題名 | 学会名 | 研究室 | 内容 |
| Advanced Robotics Challenge の現状と展望 | 第9回WROロボット教育シンポジウム | 蓮田裕一研究室 | 詳細 |
自律型ロボット設計上におけるmyRIOとEV3の特徴と比較
-ARC大会用ロボットの設計上の改善法- | 第28回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
myRIOを用いたWRO世界大会用ロボット設計・製作
-WRO2016ニューデリー大会対策ロボット- | 第28回日本産業技術教育学会関東支部大会 | 蓮田裕一研究室 | 詳細 |
| WRO2016ニューデリー大会における自律型ロボットの動向 | 第1回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 農薬散布ロボットの設計と開発 | 第1回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| myRIOを用いた画像解析と自律型ロボットの製作 | 第1回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| myRIOとEV3の特徴と自律型ロボットの設計 | 第1回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |
| 自律型ロボットの設計製作を通した世界的な視野を持つエンジニアの育成 | 第1回ロボット技術教育シンポジウム | 蓮田裕一研究室 | 詳細 |