Passive walking robots can walk gentle downhills only by gravity. It is energy efficient and is close to human walking. In our laboratory, we are developing a walking robot based on the principle of passive walking. We are also analyzing the mechanism of human walking from the principle of passive walking. Recently, I am making robot parts using 3D printers and the like. If you are a student who likes manufacturing, please come visit us.
Basic Information
Faculty name/Affiliation
Yoshito Ikemata / Department of Mechanical Mechanical and Aerospace Engineering Course Department of Integrated Science and Engineering and Engineering
Specialized Fields
Robotics
Research theme
Research on passive walking robots
Research on human gait mechanism
Development of walking support machine
Research on human running mechanism
Research keywords
Walking robot, passive walking, walking principle, equilibrium point analysis, walking support machine
Development of a walking robot based on the passive walking principle Walking robots represented by humanoids are the crystals of cutting-edge technology. At the heart of this is the ZMP (Zero Moment Point), which is a powerful tool for walking so that you do not fall. However, it is difficult to achieve high energy efficiency with the control method of ZMP norms, and its walking lacks naturalness. On the other hand, passive gait was proposed by T. McGeer in 1990, and forms the ideal natural gait only by the interaction between the dynamics of the pedestrian and the environment (here, the slope). In this research, we will develop a natural and highly efficient walking robot based on the passive walking principle.
Development of walking support machine based on passive walking principle Conventional walking support machines have problems such as reduced safety due to motor drive, increased weight and cost due to the installation of drive system and control system, difficulty in generating natural movement, etc., until they are widely used. Has not been reached. In this research, we will solve these problems and develop a safe, secure, and inexpensive walking support machine by following the passive walking principle. The effectiveness of walking support machines is verified not only by attaching them to humans, but also by attaching them to passive walking robots. If enabled, the robot can walk on a horizontal surface or on a very low slope. It is a unique verification method and can be evaluated quantitatively.
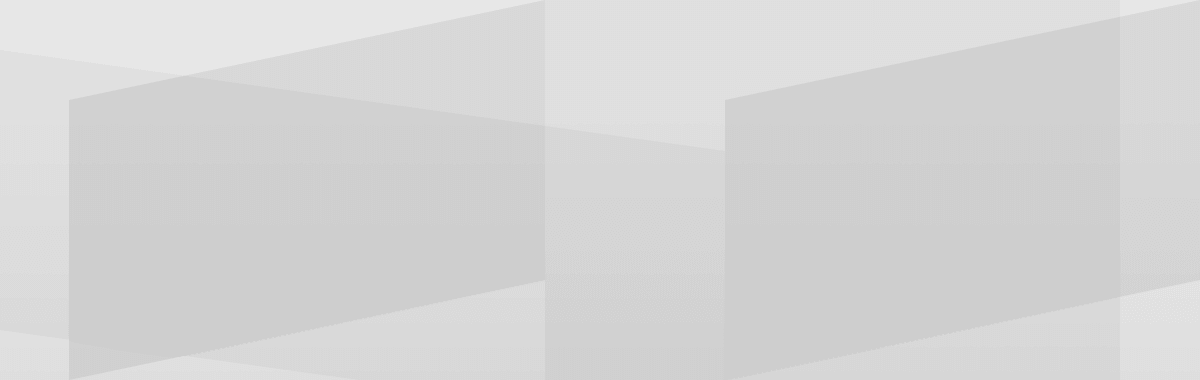
Elucidation of human driving principle and development of driving support machine Humans are running by skillfully utilizing mechanical phenomena such as "passive running", and the principle is not complicated and can be explained clearly from a mechanical point of view. In this project, we will build a simple model of human driving from the knowledge and experience cultivated in the research of passive driving. From the analysis of the same model (discrete model), the principles of a) generation of periodic motion of running and (b) stabilization of periodic motion of running will be clarified. Furthermore, using a continuous model (equation of motion), we will clarify the principles of c) leg movement during the ground contact period and (d) leg movement during the flight period. In addition, we will develop a driving support machine based on the knowledge obtained from the analysis of human driving. It is thought that the support aircraft will make it easier and faster to run.