



Utilizing his experience as a researcher at Nissan Motor Co., Ltd., involved in the development of cutting-edge autonomous driving technology,
Professor Hideaki Inoue of Teikyo University is researching "autonomous driving mobility that will please the local community."
Currently, the company is aiming to create a mobility system that is self-driving but allows users to enjoy walking without having to ride as much as possible.
At first glance, this seems contradictory,
This is a way of thinking about how to address social issues that has only become apparent because of a deep understanding of autonomous driving.
With the spread of autonomous driving
Concerns about lack of exercise
Recent advances in autonomous driving technology have been remarkable, and automatic braking, driving support functions that maintain the distance between the vehicle and the vehicle in front, and automatic driving functions under specific conditions have been realized. It is also fresh in my memory that the automatic driving bus conducted a test run at the Olympic Village of the Tokyo Olympics and Paralympics held in the summer of 2021.
If autonomous driving becomes more widespread in the future, it will become a means of transportation for people called "vulnerable people" such as the elderly living in rural areas. Even in areas where it is difficult to move without a car, it will be easier to go out and you can expect to be active. However, on the other hand, Professor Hideaki Inoue of the Department of Department of Mechanical and Precision Systems, Faculty of Science and Engineering points out that depending on the direction of autonomous driving, it may have a negative effect.
"I am concerned that elderly people will become so dependent on autonomous driving that they will stop walking on their own, even though they are still capable of doing so, and as a result, their legs will weaken. My mother's legs became weak after she broke a bone, and although she was still able to walk with the use of a cane, walking itself became painful, so she stopped going out. Eventually, she became completely unable to walk. Autonomous driving may increase the opportunities to go out, but it does not increase the opportunities to walk. In fact, I was concerned that it may decrease the opportunities to walk." (Professor Inoue)
Professor Inoue became Professor at Teikyo University in April 2020, and since spending time at Utsunomiya Campus in a lush, hilly area, he has come to feel the need for autonomous driving technology to support mobility and walking for those with limited mobility.

"Utsunomiya Cultural Forest, a vast park near the campus, has beautiful walking paths through a beech forest. There are gentle slopes, but wheelchairs can assist with these, so we would like elderly people to be able to walk these paths on their own. We are using this park as a demonstration field for research to make this a reality," says Professor Inoue.
To support walking
Personal mobility to snuggle up to pedestrians
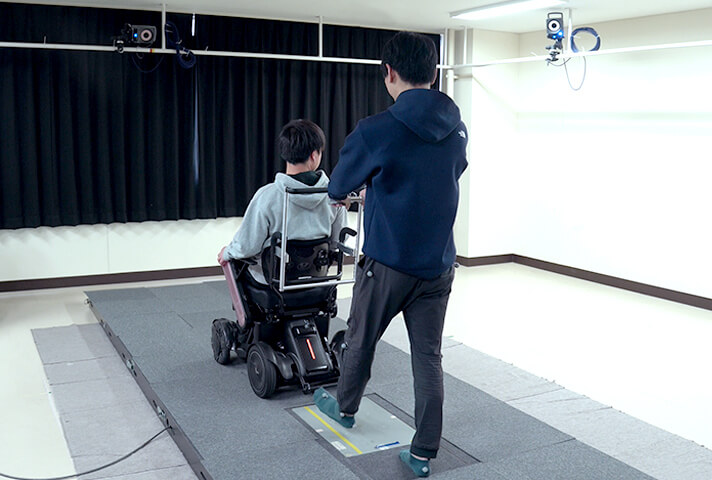
The target of his research is single-seater "personal mobility" for those with limited mobility. While cart-like vehicles and small cars are common personal mobility devices for the elderly, Professor Inoue chose a commercially available electric wheelchair, saying, "The electric wheelchair is the most convenient form of personal mobility." He is currently developing a control program based on this electric wheelchair to make it easier for the elderly to ride.
While an electric wheelchair is essentially a "vehicle," the electric wheelchair Professor Inoue is researching is designed to "walk together" with people rather than carry them. If you hold onto the handle attached to the backrest, it will pull you up a slope, and if you get tired, you can get in the wheelchair and be taken home.
As for autonomous driving technology, functions such as "driving with pedestrians," "driving from behind," and "going home with the touch of a button" are envisioned. The wheelchair is equipped with a laser scanner and a camera, and keeps a distance from pedestrians and runs from behind like a pet. In addition, SLAM (Simultaneous Localization and Mapping) technology, which reads surrounding information with a laser and generates a map, allows you to move smoothly while checking your position even in the first place if there is a three-dimensional object such as indoors. ..


The current issue is a mechanism to control the electric wheelchair so that when a person walks from the front or there is an obstacle in the direction of travel, the electric wheelchair avoids the person or obstacle once and then returns to the original position. is. Complex processing is required to avoid all obstacles and get close to pedestrians. Technically, it is a problem that can be solved by applying SLAM technology and AI, but he does not want to use a method that requires as expensive a sensor as possible.
"In this research, we are considering driving on fixed routes, such as for shopping around the home, going to the doctor, or taking a walk. Just because it's autonomous doesn't mean we need to aim for perfection, and we should be flexible and consider lowering the level of automation," says Professor Inoue.
Physiological and mechanical analysis of gait
Pursuing a secure interface
While Professor Inoue is conducting research into the automation of electric wheelchairs, he is also working to elucidate the mechanisms behind walking assistance. One example of this is a joint study with Senior Assistant Professor Fujii Hiroaki of the Department of Department of Judo Therapy Faculty of Medical Technology. They are trying to clarify from a physiological perspective the extent to which physical strain is reduced when a person is pulled while walking in an electric wheelchair currently under development. In the field of sports biomechanics, which is Senior Assistant Professor Fujii's specialty, physical strain is often evaluated by heart rate, but here too, he is conducting research to capture the difference between the presence and absence of walking assistance through changes in heart rate.
In addition, using an experimental device with a sensor embedded in the floor, the pedaling force when walking is measured. By comparing the difference between pulling with an electric wheelchair and normal walking, we are trying to clarify why it leads to a reduction in walking load.
More recently, we have started joint research with Associate Professor Yoshito Ikemata, who studies walking robots in the Department of Mechanical and Precision Systems, Faculty of Science and Engineering. Together with Associate Professor, who studies the mechanism of walking, we created a mathematical model of walking supported by an electric wheelchair while utilizing the walking data obtained in joint research with Senior Assistant Professor Fujii, and the mechanical mechanism of walking support. I am aiming to clarify. We believe that this will lead to optimization of the shape of the handle that the pedestrian can grasp, the assist method, and improvement of safety.
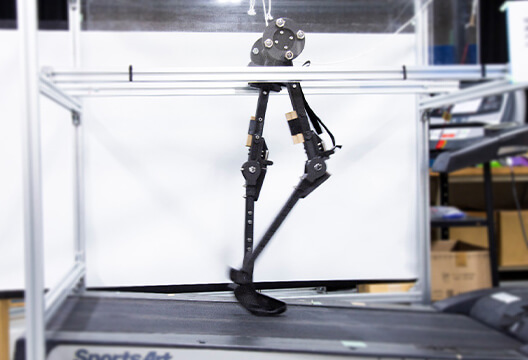
"Through joint research with experts on the human body and walking, we have come to understand that human walking is carried out by an extremely efficient mechanism known as 'pendulum motion.' This may be self-evident to walking experts, but it was a completely new discovery for me, as I had always thought that walking moved forward solely through the force of the feet pushing back against the ground. At university, I feel the excitement of research that allows me to pursue the truth in this way every day." (Professor Inoue)
From the forefront of autonomous driving research
To research that pleases the community
Before joining the faculty at Teikyo University, Professor Inoue worked as a researcher at Nissan Motors for over 30 years. He continued to conduct research at the forefront of autonomous driving technology, including current research into automatic braking and ACC (active cruise control). Looking back on that time, he says that CEATEC JAPAN, held in 2013, was particularly memorable. Just the fact that an automaker exhibited at CEATEC, an exhibition of home appliances and IT, generated a lot of buzz, but the company also exhibited a self-driving car based on an electric vehicle at the exhibition venue, and demonstrated autonomous driving on a course set up within the venue.
"At the time, it was still thought that autonomous driving would be difficult to achieve. It had a huge impact on the world, showing that it was possible to detect the approach of other cars, stop, start, turn, avoid parked cars, and stop according to signs," says Professor Inoue.
Having traveled this path in autonomous driving research, the group is now aiming to create "technology that will please the local community." First, they will advance research to realize personal mobility that will ensure the comfort, safety, and health of elderly people living around Utsunomiya Campus.


Regarding future prospects, Professor Inoue says, "I would like to develop this into experimental research in collaboration with local elderly care facilities, and industry-academia collaboration with startup companies considering entering the welfare equipment and personal mobility fields." Eventually, Utsunomiya Campus will become a base for addressing issues facing the transportation-challenged and elderly, and from here they will propose new value in personal mobility and autonomous driving technology.
