![]()


本研究室では、脳の情報処理の計算論的な解明と推論などの高次機能の工学的な実現をめざして研究を行なっています。また、脳型情報処理を現実世界の課題に適用することで、古典的な人工知能の情報処理能力の限界を打破して,脳型情報処理システムの有用性を示していくことも一つのテーマです。特に、人支援技術の開発を行っています。
本研究室のメンバーそれぞれがニューラルネット、ロボットや人工知能などの分野におけるテーマをもって研究しています。学部4年生は卒業研究を通じて、研究の進め方、論文の書き方、プレゼン発表のやり方を学びます。大学院生は自分のテーマをさらに深め、他の研究者と交流し、その成果を論文や学会発表などで発信します。また、研究インターンの学部1~3年生と協力して屋外自律移動ロボットの開発も行っています。
| 教員名・所属 | 山根健 / 理工学部情報電子工学科 |
|---|---|
| 専門分野 | 知的情報処理、ソフトコンピューティング、人支援技術 |
| 研究テーマ |
|
| 研究キーワード | ニューラルネット、分散表現、人工知能、表面筋電位、屋外自律移動ロボット |
| 教員紹介URL | https://www3.med.teikyo-u.ac.jp/profile/ja.5bc1a31eaf3dac8e.html |
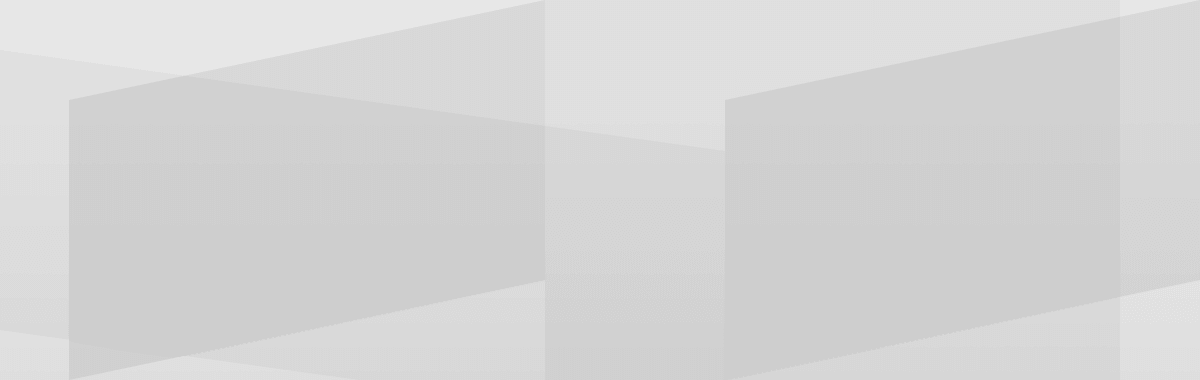
リカレントニューラルネットを用いた脳型推論
古典的な人工知能(古典的AI)は、外界情報を記号として内部表現して、その記号を操作することで推論などの情報処理を実現します。しかし、古典的AIには2つの未解決問題(シンボルグラウンディング問題とフレーム問題)が存在します。このためその情報処理能力には限界があります。
これに対して我々は、脳の情報処理に注目しています。脳では,多数の神経細胞(ニューロン)の活動パターンとして分散的に情報表現し、ニューロンの回路網(ネットワーク)が作り出す自律的なダイナミクスに従ってパターンが動的に変換されます。これらをヒントとして、リカレントニューラルネットを用いた脳型推論方式について研究しています。
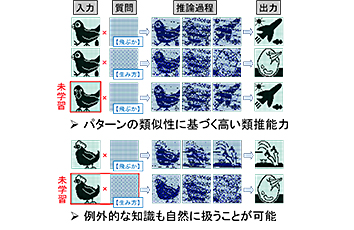
脳型情報処理系を用いた表面筋電位信号からの手・腕の動作推定
人の認知・運動機能をサポートする人支援技術の開発をめざしています。例えば、手や腕の機能をロボットアームで代替することを考えます。そのためには、人の動作意図や計画を素早く推定する必要があります。しかし、意味のある“動作”や幾つかの動作の組み合わせからなる“行動”は空間的にも時間的にも変化するので扱いがとても難しいのです。
これに関して我々は、腕の皮膚表面から取得できる筋電位信号から、連続時間のダイナミクスをもつリカレントニューラルネットの1種である軌道アトラクタモデルを用いて、手や腕の行動を推定するシステムを提案しています。本システムは複雑な行動を柔軟に推定することができるため、応用に向けて大きな可能性があります。
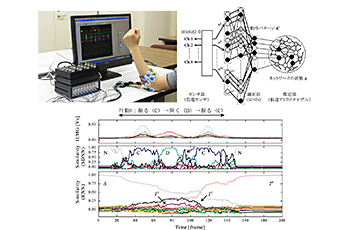
屋外自律移動ロボットProgress-iの開発
人のために整えられた屋外環境において、目的地まで安全かつ確実に自分で判断して走行できるロボットを開発しています。屋外なので行動する範囲が広く、歩行者が飛び出してきたりタイヤがスリップしたり天気によってセンサがうまく機能しなかったりなど想定外のことが頻繁に起こります。ロボット自身の位置を精度よく推定するとともに、柔軟に環境を認識しながら賢く移動していくことが求められます。
このロボットは将来的に大規模太陽光発電施設(メガソーラ)の設備を自動点検するシステムの一部として利用する計画です。何万枚もあるソーラパネルを1つ1つ巡回してパネルの裏側から熱画像カメラで撮影してデータを解析サーバに送り、局所的に熱をもつような場所(ホットスポット)を発見するシステムです。
| 題名 | 研究室 | 内容 |
|---|---|---|
| 分散表現と神経力学系のダイナミクスに基づく手の行動推定 Estimation of Hand Motions Based on Distributed Representations and Neurodynamics | 山根健研究室 | 詳細 |
| 演題名 | 学会名 | 研究室 | 内容 |
|---|---|---|---|
| つくばチャレンジ2016における屋外自律移動ロボットProgress-i MK-IIの開発 (予稿:1B3-5、 pp.126-127、 2016) | 第17回計測自動制御学会 システムインテグレーション部会講演会(SI2016) | 山根健研究室 | 詳細 |





先生方が日々取り組んでいる研究について、どのようなきっかけで取り組むようになったのか、その研究はどのような形で社会に生かされていくのかなど、研究室紹介だけでは紹介しきれない内容や、普段なかなか知ることのできない先生方の研究に対する熱い思いなどをご紹介します。